Today's blog was written by ADEON lead PI, Jen Miksis-Olds. Yesterday we deployed bottom lander #5 on the Blake Plateau in approximately 900 m of water. The evening was spent doing net tows and fine scale acoustic surveys to get more information about the small marine life in the water. During daylight hours, the day watch rotates through 90 min marine mammal observation (MMO) shifts. The MMO shifts have been a disappointment the past 2-3 days. We saw nothing but flying fish in great expanses of blue water. We are hoping to see more at the next site when we transit to the next two deployment sites in shallower water.
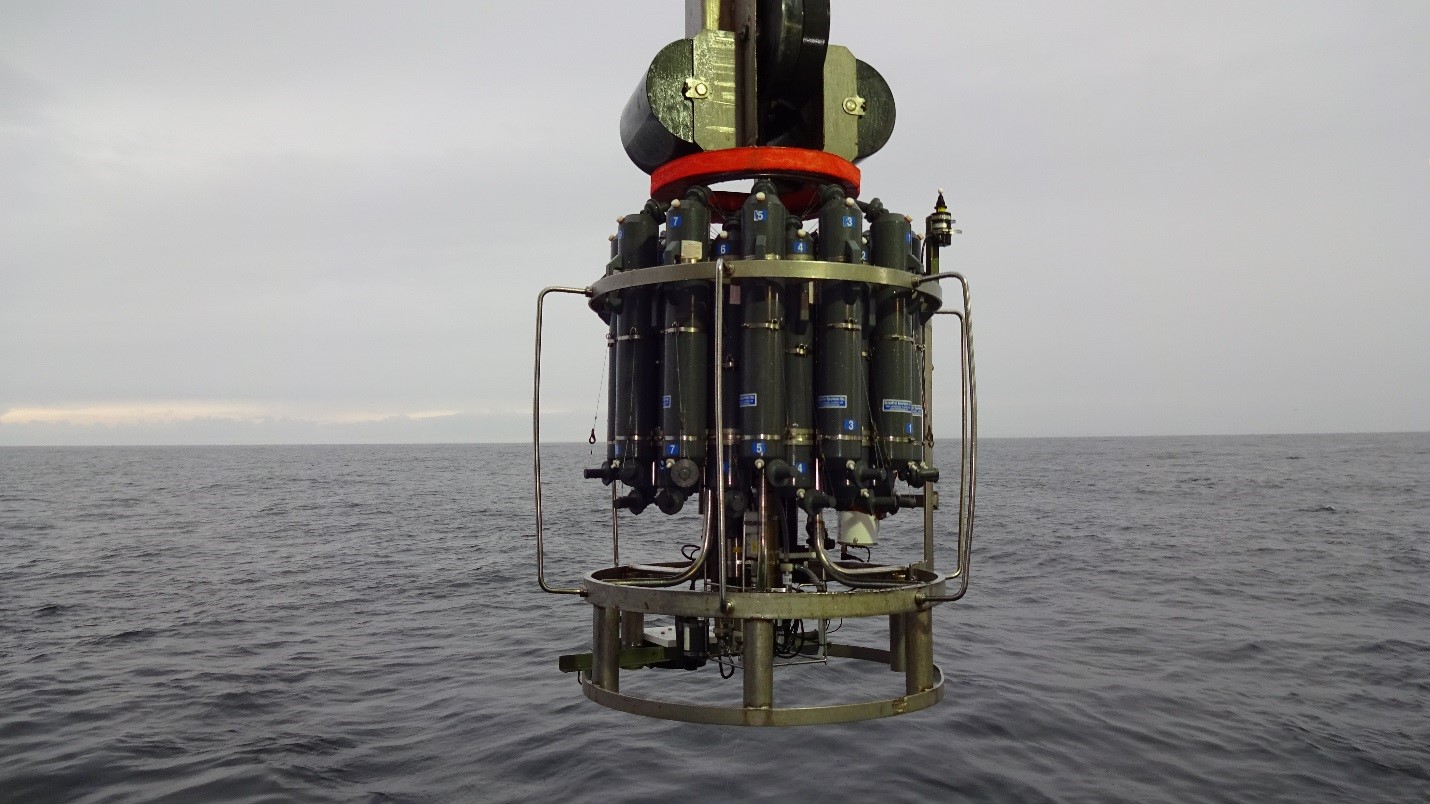
Today was spent searching for deep water. Upon arrival at each site, the first thing we do is a CTD (sensor to measure salinity, temperature, and depth) cast from the surface to the ocean bottom. This tells us how fast sound is travelling in the water column. Of much interest to those studying sound propagation is the location and depth of the SOFAR channel. SOFAR stands for SOund Fixing and Ranging, and it occurs where the speed of sound is the slowest. In deep water regions, this is typically around 1000 m. Knowing the location and depth of the SOFAR channel will help in modeling the regional soundscape. The lander #5 deployment site CTD showed that we weren’t deep enough for a visible SOFAR channel, so we’ve spent the day transiting east into deeper water to try and find it. I can tell you the Blake Plateau is flat and very broad. After 6 hours of searching, the deepest water we’ve found was 1020 m, and the CTD cast still showed no clear SOFAR channel. A few more hours of searching before we return to the deployment site for more evening net tows!

|
|